자율주행 대회에서 CAN 개발을 맡게 되었다.
그동안은 특정 변수에 값을 보내기만 하면 제어가 되도록 통신이 다 만들어진 차량에서만 개발을 해왔는데, 처음해보려니 생소하다.
목표는 CAN Data를 ROS2에서 송수신할 수 있도록 하는 것.
개발 환경은
- ROS2 Humble
- Ubuntu 22.04
- Kvaser Leaf Light2
개발 순서는
수신 Rx
- socketcan으로 ubuntu와 CAN 케이블 연결
- ros2-socketcan driver로 can raw 데이터 수신
- 제공받은 table에 맞게 can msg 정의
- 3번에서 정의한 msg를 사용하여 rostopic 생성
송신 Tx
- 제공받은 table에 맞게 encoding 개발
- 송신부 개발 (아직 ros2-socketcan driver를 완벽히 파악못해서 만들어야 하는 건지도 모르겠음)
여기서는 수신 2번까지의 결과를 기록한다.
개발 과정


연구실에 Ethernet과 연결된 D-sub 9-pin이 있길래 해체해서 2번과 7번과 전선을 납땜하여 CAN 용으로 만들었다.
전선은 24 awg 규격을 사용하였음.
수신
- tool 설치
sudo apt-get install can-utils sudo apt-get install net-tools sudo apt-get install libmuparser-dev - 컴퓨터와 can 장치 연결
- Kvaser를 사용하는 경우 (물리적으로 연결하는 경우)
sudo modprobe can
sudo modprobe kvaser_usb
sudo ip link set can0 type can bitrate 500000
sudo ifconfig can0 up
- vcan으로 개발하는 경우 (가상 can)
실제로는 항상 can 케이블을 연결한 채로 개발 할 수 없기 때문에 vcan을 사용하여 테스트하며 개발하려함.
sudo modprobe vcan
sudo ip link add dev vcan0 type vcan
sudo ip link set vcan0 txqueuelen 1000
sudo ip link set up vcan0
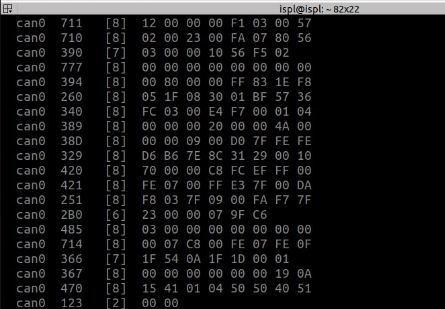
candump can0
혹은
candump vcan0 - virtual can을 사용하는 경우
으로 데이터 확인할 수 있음.